1.版本:matlab2021a,我录制了仿真操作录像,可以跟着操作出仿真结果 ...3.内容:Kinect相机进行图像采集并进行3D重建matlab仿真,输入不同视角的图像,输出场景的三维模型。 4.适合人群:本,硕等教研学习使用
”Kinect相机 3D重建 matlab仿真“ 的搜索结果
1.版本:matlab2021a,包含程序仿真操作录像,可以跟着操作出仿真结果 2.领域:3D重建 3.内容:使用Kinect V2相机采集深度和RGB图像并进行3D重建matlab仿真+仿真录像
matlab_(含教程)Kinect相机进行图像采集并进行3D重建matlab仿真
matlab_(含教程)使用Kinect V2相机采集深度和RGB图像并进行3D重建matlab仿真

目标:某企业为3C部件精密加工企业,其加工的零件为手机玻璃,要求加工精度为±0.01mm,目前为人工运输至加工中心加工,由人工采用千分表在大理石平台上逐个测量实现。企业为减少人工成本,提高生产效率,要求采用...
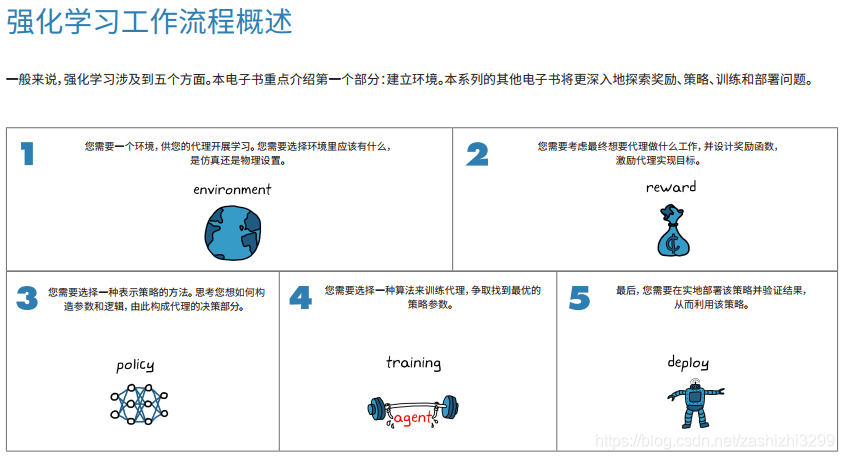
基于粒子滤波框架的激光SLAM,RBpf粒子滤波算法,即将定位和建图过程分离,先进行定位再进行建图,结合里程计和激光信息,每个粒子都携带一个地图,构建小场景地图所需的计算量较小,精度较高。...
PMD公司 ... 1M的SPAD TOF,下不到论文,远距离SPAD,近距离iTOF ... TOF标定方法,14年 A ToF camera calibration toolbox; tested with Intel Creative; tests for Kinect 2 in progress https://github.com/ka
SLAM是Simultaneous Localization and Mapping的缩写,意为“同时定位与建图 (同步定位与地图构建)”,是业界公认视觉领域空间定位技术的前沿方向。它是指运动物体自身位置不确定的条件下,根据传感器的信息,一边...
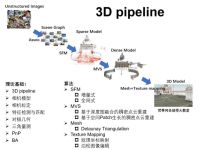
点击上方“3D视觉工坊”,选择“星标”干货第一时间送达三维重建在计算机视觉中是十分重要的,其中涉及很多的技术内容,为了后来人能少走弯路,也为了对自己的知识框架系统总结,特记录自己的学习路...
随着信息技术的高速发展,虚拟现实、增强现实等逐渐火热。虚拟现实是一种完全建立虚拟环境,让人类脱离现有环境进入新的世界,它的广泛应用可能还要经过一段时间的积淀,目前虚拟现实主要在科研仿真、...
SLAM(Simultaneous Localization and Mapping)同步定位与...用眼睛观察周围地标如建筑、大树、花坛等,并记住他们的特征(特征提取)在自己的脑海中,根据双目获得的信息,把特征地标在三维地图中重建出来(三维重建)
基于KINECT的拖拉机防撞系统
标签: 毕设
基于Kinect的拖拉机防撞系统摘要:随着智能车辆技术的发展,智能导航定位和实时车载监控等技术被更多的应用到日常生活照。在农业领域上,车辆自主感知道路环境并制定实时避障策略还存在不足,特别是在农田,因为人员...
本文主要针对并联机器人在对食品、机械零件及其他不规则形状物体等生产线上无 序放置的多目标物体抓取时,物体种类存在多样性和摆放位姿的不同所造成的抓取点选 取不当造成分拣效率低的问题,设计了一种基于点云配准...
基于Kinect的拖拉机防撞系统电子信息科学与技术专业学生 sukeysun 摘要:随着智能车辆技术的发展,智能导航定位和实时车载监控等技术被更多的应用到日常生活照。在农业领域上,车辆自主感知道路环境并制定实时避障...

Star 200+...支持以下功能:3D本地化3D映射路径规划路径跟随加速/制动/转向控制数据记录汽车/行人/物体检测交通信号检测交通灯识别车道检测对象跟踪传感器校准传感器融合面向云的地图连接自动化智能手机导
中级)39使用stm32读取UbloxGPS模块的UBX协议数据@qq_4265989277中40ubuntu20.04使用微软Azure Kinect DK 实现三维重建demo记录@洁白的七星85中41iwebsec靶场SQL注入漏洞-数字型注入@古木木木木木75中(领域:web;...

可在www.sciencedirect.com在线获取ScienceDirectCAAITransactions on Intelligence Technology 1(2016)272e284http://www.journals.elsevier.com/caai-transactions-on-intelligence-technology/原创文章基于倒角...
近年来,随着自主导航的广泛应用,视觉同时定位与地图构建(Visual simultaneous localization and mapping, V-SLAM)通过自身携带的视觉传感器对周围环境进行重构并且估计出自身的位置,准确定位与高精度的V-SLAM算法...

点击上方“3D视觉工坊”,选择“星标”干货第一时间送达编辑:3D视觉工坊链接:https://www.zhihu.com/question/35186064本文仅作为学术分享,如果有侵权...
什么是深度学习? -45分钟理解深度神经网络和深度学习 刘利刚 中国科学技术大学图形与几何计算实验室 ...近年来,人工智能(Artificial Intelligence, AI)和深度学习(Deep Learning, DL)非常火爆,在各个领域...
用户篇
致敬: https://blog.csdn.net/zhongguoren666/article/details/6697025 http://www.elecfans.com/emb/603169_a.html ... 1概念比较 OpenCV = Open Source ...
ICRA上的一篇文章,提出了一种检测三维物体关键点检测以及6 DoF位姿估计的方法,可以用于instance- and category-based 的场景。 首先采用Faster R-CNN检测得到目标的2D bb, 然后在执行所提出的方法。...
推荐文章
- Kotlin实现一对一直播软件源码底部弹出的列表对话框_android anylayer弹出对话框-程序员宅基地
- MyBatis 动态SQL之<choose><when><otherwise>标签-_mybatis choose when-程序员宅基地
- 多种智能优化算法性能对比(FHO,CO,SSA,PSO等)_与pso算法相类似的算法-程序员宅基地
- Kubernetes安装Seata1.8.0(注册到Nacos,连接外置数据库)_ks8部署seata集成到nacos-程序员宅基地
- RK3588网口拓展:8口千兆傻瓜式交换机RTL8370N_rtl8370使用-程序员宅基地
- vue三级联动下拉菜单_vue三级联动下拉列表怎么实现-程序员宅基地
- 烂笔头笔记:关于frontend-maven-plugin插件无法下载nodejs和npm的问题_windows环境下无法从github下载frontend-maven-plugin:1.12.0-程序员宅基地
- 江苏科技大学计算机科学与技术,江苏科技大学计算机科学与技术专业2016年在江苏理科高考录取最低分数线...-程序员宅基地
- 【百度大脑新品体验】驾驶行为分析_为什么选用百度智能云驾驶行为分析接口-程序员宅基地
- 深度学习模型Intel与ARM部署性能分析,Intel和ARM CPU上CNN计算速度差距分析。_arm中数据搬运速度太慢-程序员宅基地